红花是一种在世界范围内广泛种植的经济作物,由于其含有天然色素和活性成分,具有很高的商业价值。红花花丝的机械化采收是一项技术性、季节性的工作。在红花采收过程中,机械采收高含水率的红花,造成花丝破损率高,果球破损,严重限制了红花产业的可持续发展。因此,在保证去除率的同时减少果球和断丝,成为提高红花机械化采收水平必须攻克的技术难关。
安博网页版机电工程学院(新能源学院)张振国副教授团队在《International Journal of Agricultural and Biological Engineering》在线发表一篇题为 A clamping root-cutting end-effector for harvesting fresh safflower的研究论文。
该研究提出了一种用于高含水率红花采收的夹持根切式末端执行器,采用对辊预夹紧红花丝、刀具根切的方式完成红花采收作业。通过构建对辊-刀具-花丝切割的力学模型,理论分析采收过程,确定影响末端执行器性能的关键因素为刀具进给速度、对辊旋转速度和对辊间隙。以花丝采净率和破损率作为评价指标,进行中心复合设计试验,获得试验因素与评价指标间的数学模型,并通过多目标优化回归模型获取最优参数组合。
如图1所示,红花收获机器人的结构包括移动系统、花丝收集系统、夹持切根末端执行器、空间定位系统、中央控制系统、动力系统等。根据花丝运动状态,红花收获过程分为4个工作阶段。在第一阶段,中央控制系统调整末端执行器的位置。空间定位系统将末端执行器移动到红花果球的顶部,如图1 a所示。在第二阶段,空间定位系统继续向下移动。在负压气流的作用下,花丝被卷起并保持垂直状态,花丝的铺展度明显减小。花丝被卷入夹紧机构,切根机构处于打开状态,如图1 b所示。在第三阶段,中央控制系统启动切根机构的步进电机。切根机构切断红花颈部,花丝与果球分离,如图1 c所示。在最后阶段,花丝被完全卷入夹紧机构。最后,花丝在负气流的作用下进入花丝收集箱,如图1 d所示。
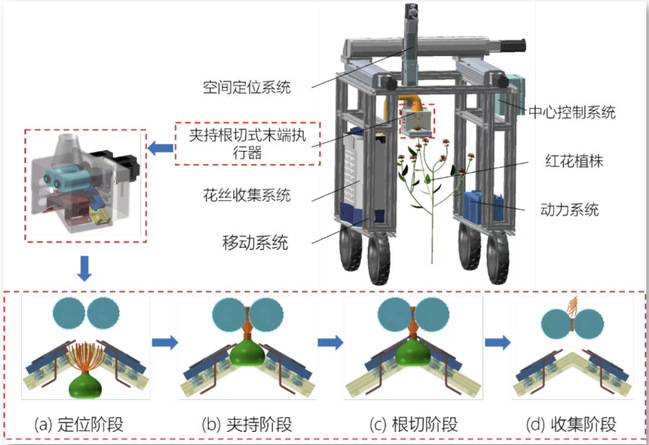
图1 红花收获机器人
夹持机构和根切机构是末端执行器的核心部件。图2的结构中显示了决定细丝夹紧和根部切割效果的关键部件。它主要由双滚筒、切根刀片、保持器、刀片滑道、支撑板等组成。在采收作业过程中,夹持机构实现了红花的预夹持。随后,切根机构的切根刀片沿着刀片滑道运动,实现对红花细丝的切割。最后集丝系统通过负压气流将红花花丝收集起来。
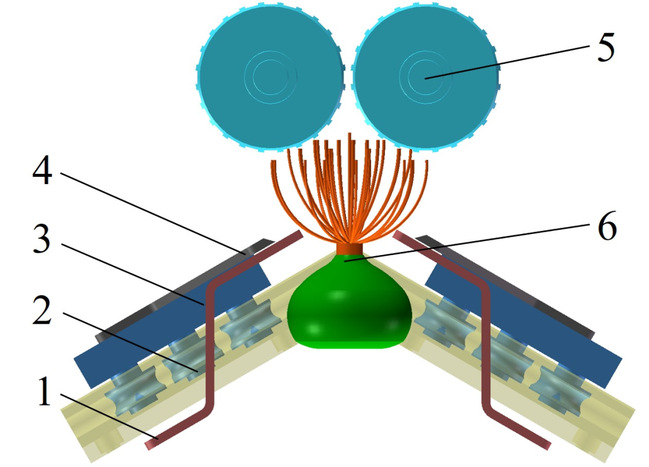
1.切刀导向装置 2.上切刀 3.红花 4.下切刀 5.果球对花罩
图2 夹持根切组件结构示意图
基于各显著项交互作用对于响应指标交互作用的影响,由于各响应指标随对辊转速、切刀进给速度和对辊间隙的变化规律不同,需建立参数优化数学模型。根据响应分析,各因素对花丝采净率和花丝损坏率的影响各不相同。因此,通过多目标优化方法获得了花丝收割性能所需的最佳参数组合。优化目标为最高的花丝采净率和最低的花丝损坏率。规划的目标函数和约束条件如式(1)所示。
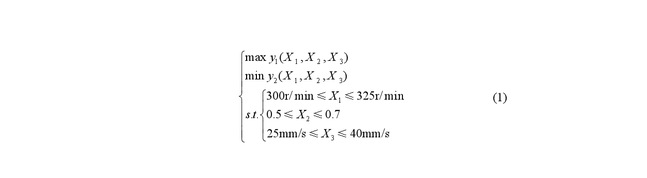
利用Design-Expert 软件求解公式(5-5),得出影响因素的最佳参数组合如下:转速为318 r·min-1,滚筒间隙为0.6 mm,刀片进给速度为40 mm·s-1。在这种情况下,花丝采净率和花丝损坏率的优化参数分别为91.06% 和5.31%。
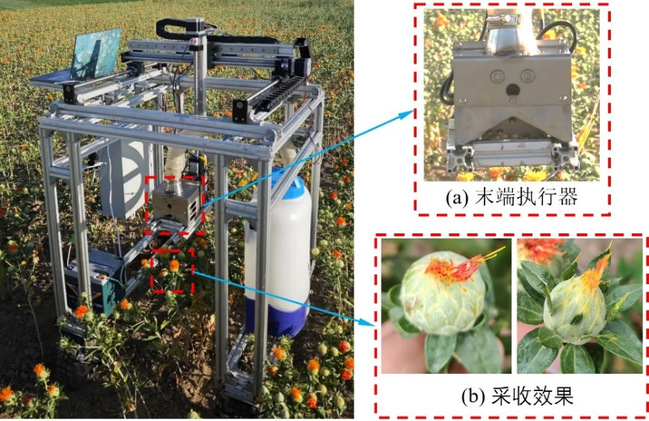
图3 红花丝采收机及关键部件试验过程
最终确定最优参数组合为刀具进给速度40 mm/s、对辊旋转速度318 r/min、对辊间隙0.60 mm。在最优参数组合下进行田间试验,花丝去除率和损伤率分别为91.25%和5.57%。与预测值的相对误差不超过5%,理论值与实际值相近。验证了模型的准确性,最优参数组合可满足实际应用要求。表明所设计的末端执行器能够实现高采净率、低破损率的花丝采收。研究为高含水率红花低损伤采收提供了重要的理论参考。
安博网页版机电工程学院(新能源学院)张振国副教授为论文的第一及通讯作者,硕士研究生曾超等为主要完成者。该研究得到了国家自然科学基金(项目编号:32460449、52265041和31901417)、中央引导地方科技发展资金(ZYYD2025ZY11)等项目的资助。同时,该研究还得到了新疆云光红花种植农民专业合作社、新疆智能农业装备重点实验室、新疆察县红花科技小院提供地支持。




