红花不仅是一种重要的油料作物,在工业、饲料、制药等领域也有重要的应用价值。红花具有多茬采收特性(3-5次),采收窗口期短且劳动力需求大。若未能及时采收,会导致花丝枯萎并影响后续开花,进而降低产量和品质。作为机械化采收的核心部件,末端执行器的性能直接决定了花丝采收效率和质量。同时,花丝的物理特性(如形态和含水率)会随开花后天数发生动态变化,对采收设备的设计提出了更高要求。因此,优化和创新末端执行器以保证花丝采净和完整性,降低花丝破损成为提高红花机械化采收水平的技术难点。
安博网页版机电工程学院(新能源学院)张振国副教授团队在《International Journal of Agricultural and Biological Engineering》在线发表一篇题为Development of a rotary push-cut-type negative-pressure-airflow end-effector for harvesting safflower filaments的研究论文。
该研究提出了一种推拢-旋切式负风压采收红花丝的末端执行器,采用阿基米德螺旋线和对数螺线设计的刀具结合负压气流的方式,对散乱、柔软的红花丝完成高效聚拢、低损切割与同步收集的采收作业。通过构建刀具-花丝切割力学模型和切割腔室流场仿真模型,理论分析了刀具推拢、旋切过程中花丝的受力与运动特性以及气流场分布规律,确定了滑切角、刀具进给速度和负压气流速度等关键参数及其影响因素。以花丝采净率、破损率和掉落率作为评价指标,进行单因素试验和Box-Behnken中心复合试验,获得了试验因素与评价指标间的二次回归数学模型,阐明了各因素对采收效果的交互作用规律。
推拢-旋切式红花采收机器人整机结构如图1(a)所示。主要由推拢-旋切式末端执行器、集花系统、红花检测系统、中央控制系统、空间定位系统、移动系统组成。其中推拢-旋切式末端执行器与红花检测系统固接于空间定位系统调整平台,通过花丝输送管道与集花系统连接。中央控制系统通过螺栓连接在移动系统侧面。集花系统安装在移动系统底部。作业时,为保证摄像头和数据采集工作,红花检测系统的需要计算机为数据采集工作提供算力,获取红花空间位置信息,传输至中央控制系统。调整空间定位系统使推拢-旋切式末端执行器对准红花丝进行采收作业,切割后的花丝在集花系统作用下完成收集。推拢-旋切式末端执行器为采收机的关键部件,主要包括步进电机、上壳体、旋切刀、集花管、花丝拟合锥面和下壳体,如图1(b)所示。旋切刀与步进电机连接,可根据作业需求调节刀具转速。
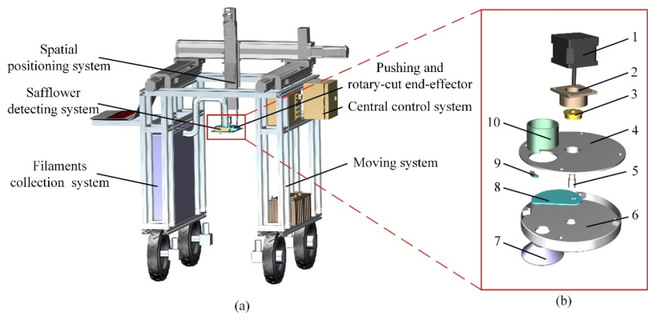
图1 推拢-旋切式红花采收机器人整机结构如图
首先,检测出的花丝进入喂入区的花丝拟合锥面。将果球挡至花丝拟合锥面外侧,花丝汇聚到切割腔室内。同时末端执行器的切割口对准花丝。然后启动电控系统和负压收集系统。切割区的旋切刀对红花丝进行推拢和旋切。最后已切割的花丝经收集区的花丝输送管道输送至花丝收集箱。
末端执行器作业时,当花丝喂入末端执行器的采收腔室(图2(b)Initial stage),步进电机驱动旋切刀推拢花丝向定刀推动,聚拢散乱的花丝(图2(b)First stage)。然后,动刀与定刀配合,完成缩颈的低速支撑切割(图2(b) Second stage),防止切割时造成花丝的多次伤害。同时,保持切割腔室内切割花丝被负压气流吸附,运送至收集箱(图2(b)Third stage),并在惯性和重力作用下沉降。
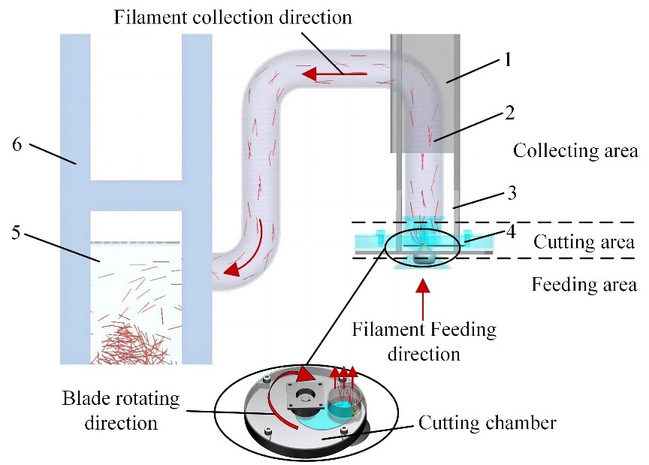
(a) 旋切采摘流程图
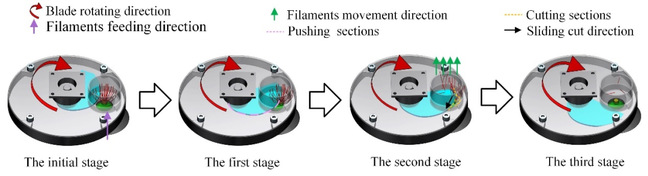
(b) 旋切流程图
图2 推拢-旋切式红花丝采收流程示意图
为确保推拢-旋切式负风压采收红花丝末端执行器具有更好的工作性能,本文根据高采净率、低破损率、低掉落率的采收目标,对采收装置的结构及工作参数进行优化,利用Design-Expert中进行优化求解,其目标函数与约束条件为:
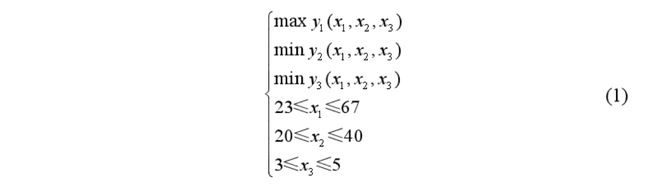
在适当的模型选择上,以花丝采净率最高,花丝破损率y2最低,花丝掉落率y3最低为优化目标,进行了多目标优化。当滑切角为32.20°,刀具进给速度为31.27 mm/s,负压气流速度为4.57 m/s,红花的采收效果最佳。此时,模型预测采净率为93.47%,破损率为6.94%,掉落率为4.33%。
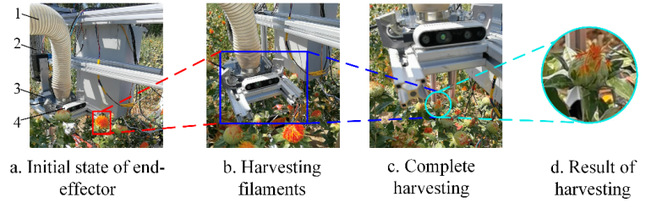
图3 田间试验过程和结果
最终确定最优参数组合为滑切角32.20°、刀具进给速度31.27 mm/s、负压气流速度4.57 m/s。在最优参数组合下进行田间试验,花丝采净率、破损率和掉落率分别为93.50%、7.02%和4.43%。理论值与实际值高度吻合,验证了模型的准确性,表明最优参数组合可满足实际应用要求。研究结果为其他易损多茬作物(如茶叶、芍药等)的机械化采收装备研发提供了创新性技术参考。
安博网页版机电工程学院(新能源学院)张振国副教授为论文的第一及通讯作者,2024届硕士研究生邢振宇(现为南京农业大学农学院博士生)等为主要完成者。该研究得到了国家自然科学基金(项目编号:32460449、52265041)、中央引导地方科技发展资金(ZYYD2025ZY11)、江苏大学现代农业装备与技术重点实验室项目(MAET202305)、以及安博网页版研究生科研创新计划项目(XJAUGRI2023021)等项目的资助。同时,感谢新疆伊犁云光红花种植农民专业合作社谭云光理事长、新疆智能农业装备重点实验室以及合作共建的新疆察县红花科技小院在进行田间实验过程中提供的帮助。




